15021982574







相关文章
Related Articles详细介绍
西门子CPU SR40代理商西门子CPU SR40代理商
S7-200 SMART,CPU SR40,标准型 CPU 模块,继电器输出,220 V AC 供电,24 输入/16 输出
上海钡斯森工业设备有限公司成立于2012年专业西门子15年.诚信经营有保障。本公司承诺假一罚十。
全新的S7-200 SMART CPU 模块,可满足不同行业、不同客户、不同设备的各种需求。SR/ST 标准型 CPU 可扩展6 个扩展模块和1 个信号板,适用于I/O 点数较多,逻辑控制较为复杂的应用。
标准型CPU模块
CPU SR20/SR30/SR40/SR60
CPU ST20/ST30/ST40/ST60
信号板
信号板直接安装在SR/ST CPU 本体正面,无需占用电控柜空间,安装、拆卸方便快捷。对于少量的I/O 点数扩展及更多通信端口的需求,全新设计的信号板能够提供更加经济、灵活的解决方案。
SR/ ST CPU 网络通信
S7-200 SMART SR/ST CPU 模块本体集成1 个以太网接口和1 个RS485 接口,通过扩展CM01 信号板或者EM DP01 模块,其通信端口数量最多可增至4 个,可满足小型自动化设备与触摸屏、变频器及其它第三方设备进行通信的需求。
ST CPU 运动控制
S7-200 SMART 晶体管输出类型CPU 模块本体最多提供三轴100KHz 高速脉冲输出,通过*灵活的设置向导可组态为PWM 输出或运动控制输出,为步进电机或伺服电机的速度和位置控制提供了统一的解决方案,满足小型机械设备的定位需求。
人性化软件,提升编程效率
STEP 7- Micro/WIN SMART 是S7-200 SMART 的编程组态软件,能流畅运行在Windows 7/Windows 10 操作系统上,支持LAD(梯形图),STL(语句表),FBD(功能块图)编程语言,部分语言之间可自由转换,安装文件小于200 MB。在沿用STEP 7- Micro/WIN 编程理念的同时,更多的人性化设计使编程更容易上手,项目开发更加高效。
SIMATIC S7-1200 控制器中集成了 2 个高速输出,可用作高速脉冲输出或脉宽调制输出。当组态成 PTO 时,它们将提供频率为 100kHz 的 50% 占空比高速脉冲输出,以便对步进电机或伺服驱动器进行开环速度控制和定位控制。通过 2 个高速计数器对高速脉冲输出进行内部反馈。当组态成 PWM 输出时,将生成一个具有可变占空比的固定周期输出来控制电机速度、阀位置或加热元件的占空比。
SIMATIC S7-1200 支持对步进电机和伺服驱动器进行开环速度控制和位置控制。对该功能的组态十分简单:通过一个轴工艺对象和通用的 PLCopen 运行功能块(包含在工程组态系统 SIMATIC STEP 7 Basic中)即可实现。除了返回(home)和点动(jog)功能以外,还支持、相对和速度运动。
工程组态系统 SIMATIC STEP 7 Basic 中的驱动调试控制面板简化了步进电机和伺服驱动器的启动和调试过程。它为单个运动轴提供了自动和手动控制,以及在线诊断信息。

在简单过程控制应用中,SIMATIC S7-1200支持多达 16 个 PID 控制回路。这些控制回路可以通过一个 PID 控制器工艺对象和SIMATIC STEP 7 Basic 中的编辑器轻松进行组态。除此之外,SIMATIC S7-1200 还支持PID 自动调节功能,可以自动计算增益、积分时间和微分时间的调节值。
SIMATIC STEP 7 Basic 中包含的 PID 调试控制面板简化了控制回路的调节过程。对于单个控制回路,它除了提供了自动调节和手动控制方式之外,还提供调节过程的图形化趋势图。
通信
CM1 241 通信模块
CSM 1277 紧凑型交换机模块
CM 1243-5 PROFIBUS DP 主站模块
CM 1242-5 PROFIBUS DP 从站模块
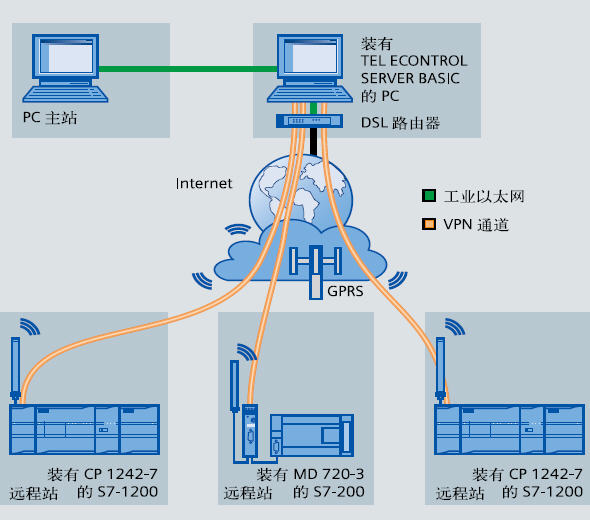
CP 1242-7 GPRS 模块
TS 模块
S7-1200 CPU
CPU 1211C
CPU 1212C
CPU 1214C
CPU 1215C
输入/输出扩展模块 SM(信号模块)
SM 1221 数字量输入模块
SM 1222 数字量输出模块
SM 1223 数字量输入/直流输出模块
SM 1223 数字量输入/交流输出模块
SM 1231 模拟量输入模块
SM 1232 模拟量输出模块
SM 1231 热电偶和热电阻模拟量输入模块
SM 1234 模拟量输入/输出模块
输入/输出扩展模块 SB 及通信板 CB(信号板)
SB 1221 数字量输入信号板
SB 1222 数字量输出信号板
SB 1223 数字量输入/输出信号板
SB 1231 热电偶和热电阻模拟量输入信号板
SB 1231 模拟量输入信号板
SB 1232 模拟量输出信号板
CB 1241 RS485
6ES7297-0AX30-0XA0 S7-1200 电池板 ------------------------------------------------------------
MC(电磁兼容性)设计;控制的快速响应;控制功能:线性v/f控制,并带有增强电机动态响应和控制特性的磁通电流控制(FCC),多点v/f控制;内置PID控制器;快速电流,防止运行中不应有的跳闸;数字量输入6个,模拟量输入2个,模拟量输出2个,继电器输出3个;具有15个固定,4个跳转,可编程;采用BiCo技术,实现I/O端口连接;集成RS485通讯接口,可选PROFIBUS-DP通讯模块;灵活的斜坡函数发生器,可选功能;三组参数切换功能:电机数据切换,命令数据切换;风机和泵类需要40个8×8 LED点阵模块,可组成16×160的矩形点阵。由于AT89C52仅有8k存储空间,而显示的内容由PC机控制,因此不可能预先把需要显示的内容做成点阵存在单片机中,而只能由PC机即时地把所需显示的点阵数据传给单片机并存入缓冲区6264。 该电路的显示采用逐行扫描。工作时,由单片机从缓冲区取出行需要显示的20字节点阵数据,再由列点阵数据输入端P1.2口按位依次串行输入至列移位寄存器,其数据输入的顺序与显示内容的顺序相反。然后置行点阵选通端P1.3为1,即置行移位寄存器的D为高电平,STR使能(所有4094的OE 引脚接+5V电平),从而使列移位寄存器中的数据同时并行输
,因而无闪烁感。 实现动态显示速度调节的通常是改变定时器的中断时间,但是当显示速度很慢的时候,该容易使整屏的刷新率,从而使显示内容出现闪烁。因此,本设计采用一种“软定时”,即在程序中命名一变量作为“软定时器”,以用来设定两次动态显示的时间间隔。在对定时中断调用计数时,如果调用达到设定值,则改变显示内容。为保证能够正常显示,“软定时器”的设定值必须大于整屏显示周期。由于显示屏每行显示1.25ms,整屏显示周期为20ms,考虑到余量的情况,可将软定时器的设定值定在大于30ms。如此循环计数,即可实现动态显示。“软定时器”的设定值可以通过机PC机来改变,这样既可实现 L
来的9个数据中前7个进行了CRC-16校验,校验结果存checksumLoByte(checksum, temp1); //把checksum的低8位temp1HiByte(checksum, temp2); //把checksum的高8位temp1if(temp1==response[7]&&temp2==response[8]) //CRC校验码进行对比判别时候接收正确{ //CRC检验正确后,把采集来的数据中);Input();【描述】个参数channel表示通道,如果通道为com1,则channel=1;如果通道为com2,则channel=2,数据类型为int。第二个参数pString表示写入通道的字符串的地址,数据类型为unsigned char *。第三个参数count表示字符串中的字符个数,数据类型为int。第四个参数result表示Output函数运行后返回的结果,如果result大于0,则表示读写有效,数据类型为int。注意:此函数只能用在freeprotocol(协议通道)中。【用法】Input(channel,pString,count,result);【举例】cha
方向(这里以从右向左为例)一列,这样显示屏可以显示更多的内容。为此,需要在下次显示之前对显示缓冲区的内容进行更改,从而完成相应点阵数据的移位操作。具体操作是: 设置一个显示缓冲区(如图2所示),该区应包括两部分:一部分用来保存当前LED显示屏上显示的10个汉字点阵数据;另一部分为点阵数据预装载区,用来保存即将LED显示屏的1个汉字的点阵数据。指针始终指向显示屏的右边原点。当指针到需要显示的点阵数据存储区的第1个汉字的首地址时,显示缓冲区LED显示区为空白,而预装载区已保存了第1个待显示汉字的点阵数据。当需要显示时,则可在接下来的扫描周期的每个行10.3.3 用PROFIBUS协议下载程序10.3.4 用TCP/IP协议下载程序小结习题第11章 可编程控制器集成11.1 问题描述11.2 硬件集成11.2.1 分析问题11.2.2 硬件集成11.2.3 编写PLC程序PLC组成1.CPU运算和控制中心起“”作用。纵:当从编程器输入的程序存入到用户程序存储器中,然后CPU根据所赋予的功能(程序存储器的解释编译程序),把用户程序翻译成PLC内部所认可的用户编译程序。横:输入状态和地利植物学家Frederich Reinitzer所发现,但是人们直到1977年才将其用作显示用途。当时Hoffmann-La Roche发明了“螺旋向列液晶显示器”并申请了。这种显示器现在被普遍用于计算器和电子手表。80年代,每个像素都由一个晶体管控制的有源矩阵液晶显示器研制,地推动了电脑、微型电视机和便携式DVD播放机的发展。虽然液晶显示器还存在显示速度慢和视角受限等技术缺陷,但是技术指出,以薄、平著称的液晶显示器5年内必将淘汰目前普遍使用的又笨又重又占位置的CRT显示器。鼠标/图形用户界面 折叠道格拉斯·恩格尔巴特在60年明了鼠标和图形用户界面。他曾这样说过
产品咨询
扫一扫 更多精彩

微信二维码

网站二维码
 欢迎来到
欢迎来到